Compared to traditional construction methods, although modular construction strategy has the advantage of fast construction, cost saving and environmental friendliness, it still poses unique challenges, such as lack of experienced skilled workers, difficult installation, and most importantly, safety hazards at the construction site. With the advancement of robotic technology and artificial intelligence (AI), AI-based robotics could be the potential solution to tackle current modular construction problems. Our research aims to robotize the traditional crane and develop automatic construction technologies to replace the traditional construction methods. So far, a number of deep learning (DL) algorithms are implemented to identify and localize construction materials on the construction site. For robotized crane motion planning, reinforcement learning (RL) algorithm is used to conduct 3D lifting path planning and transport the objects with collision avoidance.
- Simulation
The developed DL and RL have been verified in a simulation environment. Figure 1 shows the autonomous construction of a modular timber structure. The YOLOv5-S (Jocher et al., 2021), a DL algorithm, is implemented to identify and localize a modular container on the construction site. An improved proximal policy optimization (PPO), a DRL algorithm, is used to transport the modular container and conduct 3D lifting path planning with collision avoidance. The results proved that the robotic crane can successfully transport the modular container to the target position on the structure with collision avoidance.
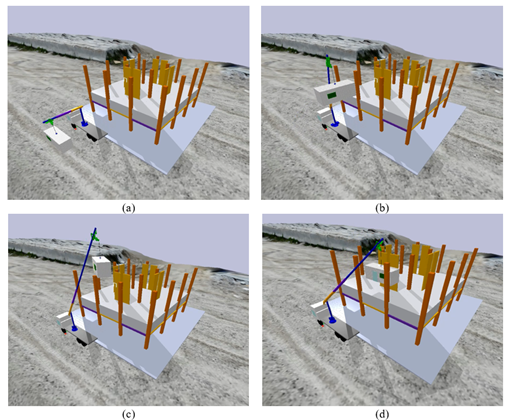
Figure 1 Autonomous construction of a modular timber structure
- Fieldwork
Our research group has already robotized a traditional mobile crane. Figure 2 and 3 show the hardware we used to control the robotized crane and the real application of robotized crane control using the hardware in Figure 2, respectively. Now our research group can control the motions of the robotized crane using PC rather than the traditional remote controller control methods.
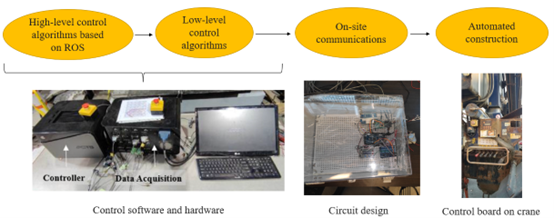
Figure 2 Hardware used to control the robotized crane

Figure 3 Fieldwork
- Future work
- Develop advanced control algorithms to control the robotized crane and achieve a high accuracy control of the crane.
- Apply the developed DL and RL in some real construction tasks.